| ビヘイビアアプローチによるシステム制御理論 |
ビヘイビアアプローチとは,システムを従来のように入出力関係として定義するのはなく,物理変数の時間軌道の集合(この集合をビヘイビア(behavior)という)によって動的システムを特徴付けるという斬新な視点に立ったシステム制御理論の枠組みです.
機械系などの実際の物理システムでは,予め入出力関係を規定することが不自然な場合があり,ビヘイビアアプローチは,システムモデリングにおいてより自然でかつ柔軟な理論的枠組みを提供するものです.
線形システムの最も素朴なシステム表現は
の微分方程式です.
ここで, はシステム変数をまとめたベクトルで,要素間に入出力関係は
仮定しません.
ビヘイビアアプローチでは,
この微分方程式の解集合(ビヘイビア)
はシステム変数をまとめたベクトルで,要素間に入出力関係は
仮定しません.
ビヘイビアアプローチでは,
この微分方程式の解集合(ビヘイビア)
を用いて,動的システムの解析を行います.
 |
 |
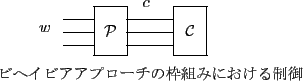
たとえば,プラントのビヘイビアを
![]() とし,
とし,![]() を被制御変数ベクトル(制御したい変数),
を被制御変数ベクトル(制御したい変数),![]() を制御変数ベクトル(制御器と共有する変数)とします.また,制御器のビヘイビアを
を制御変数ベクトル(制御器と共有する変数)とします.また,制御器のビヘイビアを
![]() とします.ここに,
とします.ここに,![]() と
と![]() の要素の間には,
入出力関係は仮定していないことに注意して下さい.
の要素の間には,
入出力関係は仮定していないことに注意して下さい.
このとき,プラントと制御器の結合系のビヘイビア
![]() は
は
プラントのビヘイビアに対して新たな制約条件と解釈することができます.これは,フィードバック制御やフィードフォワード制御を包括した一般化された制御の概念であると言えます.ビヘイビアアプローチは, この概念に基づいて(入出力関係の仮定なしに)制御系設計の数理的構造を明らかにするための理論的枠組みです.を付加することによって,変数
さて,制御理論が対象とするシステムは,近年ますます大規模化し複雑な構造をもつようになっています.ビヘイビアアプローチにおいても,このような大規模システムを研究対象とするのは自然な流れであり,また,ビヘイビアアプローチの利点を活かすことのできる対象です.実際,大規模システムにおいては,無数の変数が複雑に絡み合っており,その中から先験的に入出力関係を選び出すことは困難と思われます.
このような背景の下で,私たちは,ビヘイビアアプローチに基づいた大規模ロバスト制御系のモデリングと制御に関する基礎的研究を行なっており, いくつかの重要な研究成果をあげています.
【関連する研究業績】
Lyapunov安定定理
- "二次差分形式に基づく離散時間システムに対する一般化Lyapunov安定定理," 計測自動制御学会論文集, vol. 42, no. 5. pp. 493-502, 2006. (共著者:小島千昭)
- "An LMI condition for asymptotic stability of discrete-time system based on quadratic difference forms," Proc. of IEEE Conf. Computer-Aided Control System Design 2006 (CACSD2006), pp. 1138-1143, 2006. (jointly authored with C. Kojima)
- "Robust stability analysis of uncertain interconnections," SICE Journal of Control, Measurement, and System Integration, vol. 1, no. 6. pp. 435-442, 2008.
- "Dissipativity and stability of interconnections," International Journal of Robust and Nonlinear Control, vol. 17, no. 5-6, pp. 563-586, 2007. (jointly authored with J.C.Willems)
- "Robust stability analysis via quadratic differential forms," Preprint of 3rd IFAC Symposium on System, Structure and Control (SSSC07), Foz do Iguassu, Brazil, TM-1-2, 2007.
- "On rational quadratic differential forms," Proc. of 17th Triennial IFAC World Congress, Seoul, Korea, pp. 1311-1318, July 6-11, 2008. (jointly authored with H.L.Trentelman and J.C.Willems)
- "Canonical forms for polynomial and quadratic differential operators," Systems and Control Letters, vol. 56, pp. 678-684, 2007. (jointly authored with C. Kojima and P. Rapisarda)
- "ビヘイビアアプローチに基づく2-DシステムのLyapunov安定解析," システム制御情報学会論文誌, vol. 20, no. 2, pp. 60-68, 2007. (共著者:小島千昭)
- "Output regulation in the behavioral framework," Proc. of 17th Triennial IFAC World Congress, Seoul, Korea, pp. 12273-12278, July 6-11, 2008.
- "Decentralized control in the behavioral framework," Proc. of European Control Conference 2007 (ECC2007), Kos, Greece, pp. 5298-5304, 2007. (jointly authored with Y. Ishido)